比特派钱包2025官网下载:bit114.app,bit115.app,btp1.app,btp2.app,btp3.app,btbtptptpie.tu5223.cn
机器人能在特定环境中自如地行走与飞翔,这离不开背后视觉算法的巨大贡献。本文将为你深入解析几种核心的视觉算法。
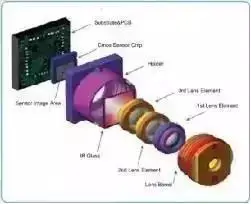
视觉算法基础:视觉传感器
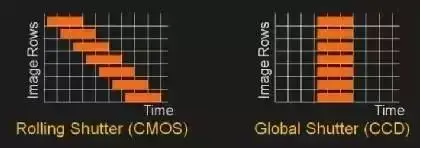
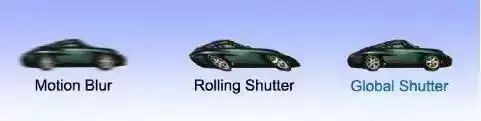
机器人视觉算法的根基在于视觉传感器。这相当于机器人的视觉器官,用于辅助其感知周遭环境。在众多视觉传感器中,采用global shutter技术的相机尤为关键,因为它能有效减少形变对立体几何计算视觉算法的影响,确保后续计算得到精确的数据。
视觉传感器种类繁多,各有特点。有的传感器对环境变化反应迅速,有的则能提供更清晰的图像。针对机器人特定的作业需求和所处环境,挑选合适的视觉传感器,能有效提升其工作效率。
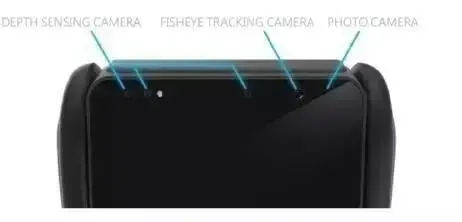
深度相机传感器分类

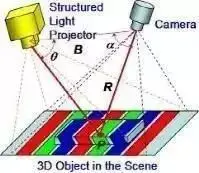
深度相机对视觉算法至关重要,它能提供必要的深度数据。在众多深度相机中,结构光传感器尤为常见,比如Kinect 1代。这种传感器基于三角定位技术,价格适中,但使用范围仅限于室内环境。

人眼无法察觉红外光斑,其图案错综复杂,这有助于双眼匹配技术的应用。即便没有主动结构光的帮助,双眼匹配技术仍能保持优异的三维成像效果,精确捕捉深度数据。
Mapping算法功能
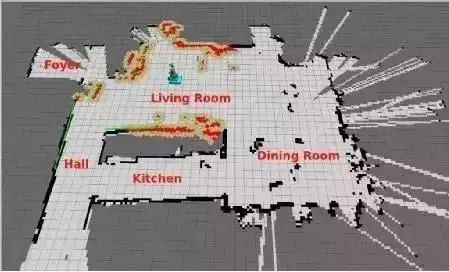
在机器人运动期间,mapping算法扮演着至关重要的角色。它能描绘出机器人所观察到的环境,并将空间中的特征点及二维地图数据存储在机器人的地图里。
运用mapping算法,机器人得以对周边环境进行初步了解。因此,在后续行动中,机器人能够依据地图中的数据来设计行进路线,从而提升行动的效率和精确度。
重定位算法作用
机器人若因遮挡或停电等原因失去了位置信息,这时重定位算法就能发挥作用。它能够根据已有的地图,对机器人现在的位置进行估算。
重定位算法的运用确保了机器人在遭遇意外时,依旧能迅速恢复至正常作业。这相当于为机器人增添了一道防护,使得其导航更为稳固。

自动导航系统要求

自动导航系统不仅需要具备地图绘制和重新定位的技术,而且机器人还需具备自动识别及解读空间内物体属性的能力,这包括物体的具体位置、高度以及体积大小。
只有对这些信息掌握得精准,机器人才能在复杂环境中巧妙绕过障碍,设计出最佳的路线。这样一来,机器人的导航系统将变得更加智能和高效。
视觉避障技术与算法
机器人若缺乏地图指引,便需依赖视觉避障技术。目前市场上存在众多避障算法,然而这些算法大多设定了较为严格的限制条件。
新型避障算法,将运动学模型简化并融入环境地图 https://www.1-b.cn,拆解了模型与算法的紧密联系,从而允许各种严谨的避障算法加入,显著提升了避障性能。
你认为在机器人技术进步中,哪种图像处理技术最为重要?若此文章对你有所启发,不妨点个赞并转发一下!
比特派钱包2025官网下载:bit114.app,bit115.app,btp1.app,btp2.app,btp3.app,btbtptptpie.tu5223.cn,tokenim.app,bitp2.app